–Robot Foundation Model with Multimodal Information
: ThermoAct: Thermal-Aware Vision-Language-Action Models for Robotic Perception and Decision-Making
–Dextrous hand manipulation with Reinforcement learning
: DexTouch: Learning to Seek and Manipulate Objects with Tactile Dexterity.
: Progressive Policy Learning: A Hierarchical Framework for Dexterous Bimanual Manipulation
: Pixel2Catch: Multi-Agent Sim-to-Real Transfer for Agile Manipulation with a Single RGB Camera
–Real-time Image Generation without Time Delay using GAN Network based on Robot Status Information and User Input during Robot Teleoperation
: Latency-Free Driving Scene Prediction for On-Road Teledriving With Future-Image-Generation
: Prediction of Delay-Free Scene for Quadruped Robot Teleoperation: Integrating Delayed Data with User Commands
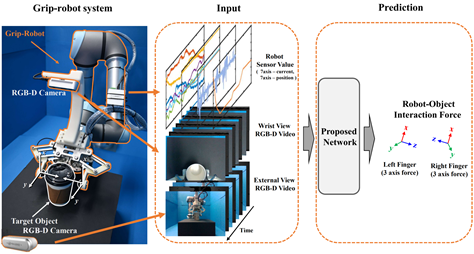
-Image-Based Interaction Force Estimation
-Development of a High-Performance Multimodal Electronic Skin Sensor of Hybrid-Type and Intelligent module for robot manipulation
–Development of Public R&D-Company Matching Network based on Technology-Commercialization Cases
–Development of AI-based Motion Analysis, Coaching and Visualization Technology during 1:N Non-face-to-face Sports Training
–Proprioception measurement system