2026
Young-Chae Son, Dae Kwan Ko, Yoon Ji Choi and Soo-Chul Lim*, “ThermoAct: Thermal-Aware Vision-Language-Action Models for Robotic Perception and Decision-Making”, IEEE Robotics and Automation Letters, 2026, Accepted, DOI: 10.1109/LRA.2026.3678130
2025

Kang-Won Lee, Jung-Woo Lee, Seongyong Kim, and Soo-Chul Lim, “Progressive Policy Learning: A Hierarchical Framework for Dexterous Bimanual Manipulation”, Mathematics 2025, 13(22), 3585; https://doi.org/10.3390/math13223585
Kang-il Yoon, Jung-Hwan Yang, and Soo-Chul Lim, “Robust Slip Detection using Magnetic Tactile Sensors during Dynamic Robotic Manipulation via Stray Magnetic Fields Compensation”, IEEE Sensors Journal, 25(19), pp 36215 – 36229, 2025, DOI : 10.1109/JSEN.2025.3598269
Kang-il Yoon and Soo-Chul Lim, “Real-to-Sim High-resolution Cloth Modeling: Physical Parameter Optimization using Particle-based Simulation with Robot Manipulation Data”, Journal of Computational Design and Engineering, Volume 12, Issue 8, pp 29–44, 2025 | DOI: 10.1093/jcde/qwaf065
(Designated as Editor’s Choice by JCDE Editorial Board)
Seunghyeon Ha, Seongyong Kim, and Soo-Chul Lim, “Prediction of Delay-Free Scene for Quadruped Robot Teleoperation: Integrating Delayed Data with User Commands”, IEEE Robotics and Automation Letters, 10(3), pp 2846-2853, 2025 | DOI: 10.1109/LRA.2025.3536222
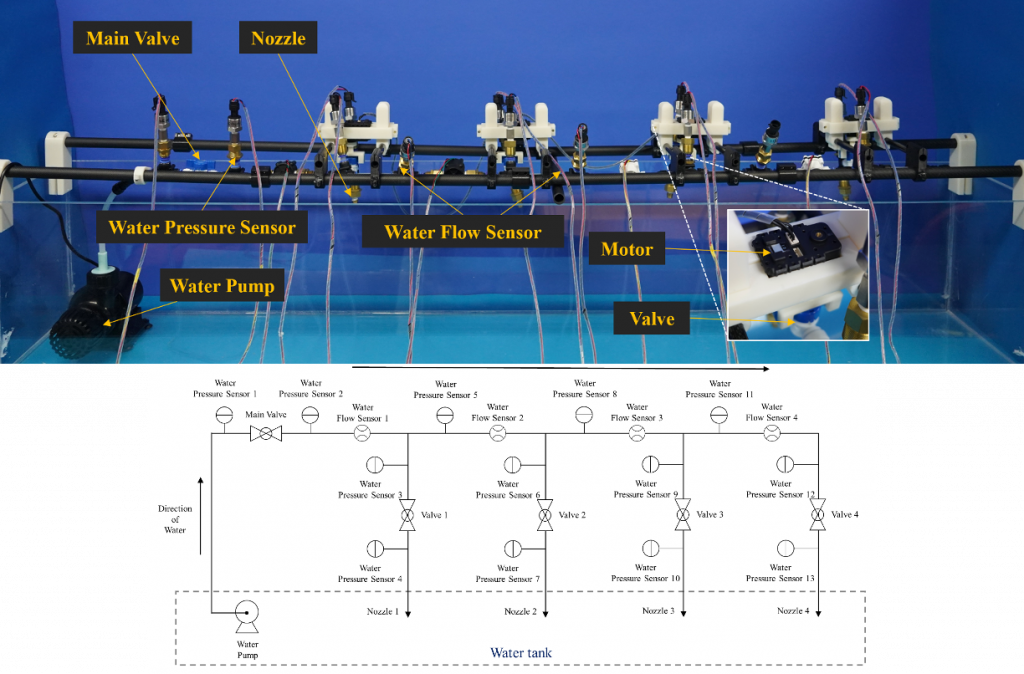
Eugene Jeong, Jung-Hwan Yang, and Soo-Chul Lim, “Deep Neural Network for Valve Fault Diagnosis Integrating Multivariate Time-Series Sensor Data”, Actuators, 14(2), 70, 2025
DOI : 10.3390/act14020070
Jung‐Hwan Yang, Kang-Il Yoon, Seunghyeon Ha, Andy Hong, and Soo-Chul Lim, “Estimating Indoor Tile Friction Coefficient Using Visual Information”, Journal of Computational Design and Engineering, 12(1), pp 331-345, 2025 | DOI: 10.1093/jcde/qwaf003
2024
Kang-Won Lee; Yuzhe Qin; Xiaolong Wang; Soo-Chul Lim, “DexTouch: Learning to Seek and Manipulate Objects With Tactile Dexterity”, IEEE Robotics and Automation Letters, 9(12), pp. 10772-01779, 2024, DOI: 10.1109/LRA.2024.3478571
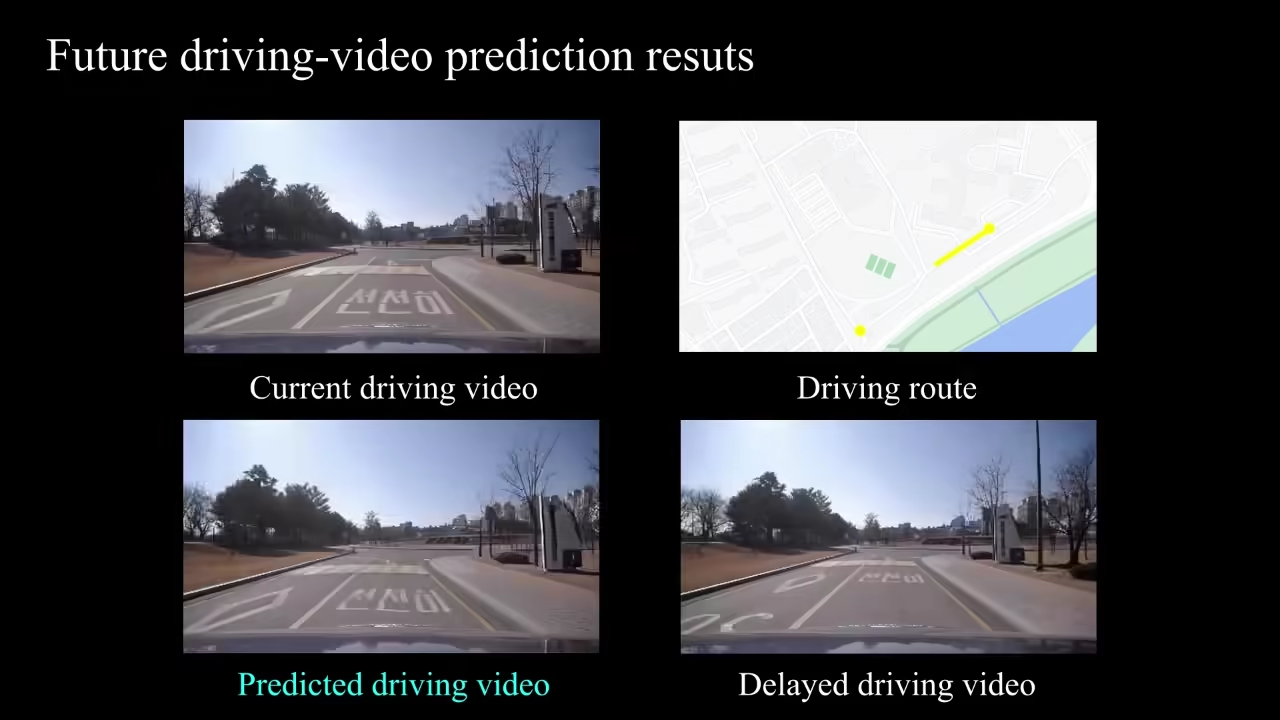
Kang-Won Lee, Dae-Kwan Ko, Yong-Jun Kim, Jee-Hwan Ryu, and Soo-Chul Lim, “Latency-Free Driving Scene Prediction for On-Road Teledriving With Future-Image-Generation”, IEEE Transactions on Intelligent Transportation Systems, 25(11), pp.16676-16686, 2024, DOI : 10.1109/TITS.2024.3435481
2023
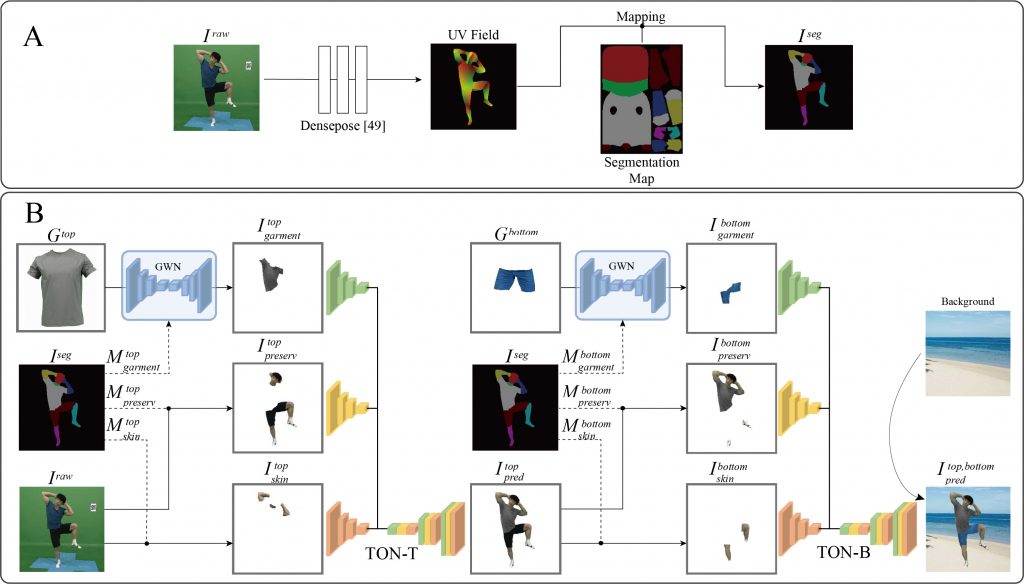
Kang-Il Yoon, Tae-Soo Jeong, Seung-Chan Kim, and Soo-Chul Lim, “Anonymizing At-Home Fitness: Enhancing Privacy and Motivation with Virtual Reality and Try-On”, Frontiers in Public Health, Volume 11 – 2023 | DOI: 10.3389/fpubh.2023.1333776
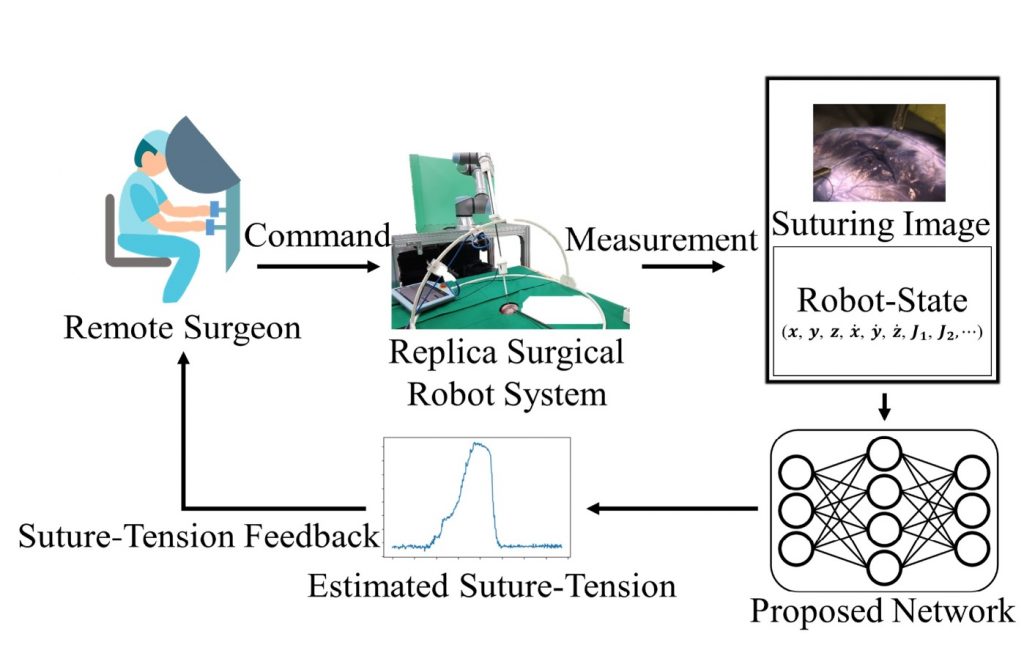
Dong-Han Lee, Kyung-Soo Kwak and Soo-Chul Lim, “A Neural Network-based Suture-tension Estimation Method Using Spatio-temporal Features of Visual Information and Robot-state Information for Robot-assisted Surgery”, International Journal of Control, Automation and Systems, 21, pp 4032–4040 2023, DOI : 10.1007/s12555-022-0469–x
Kang-Il Yoon, Dae-Kwan Ko, and Soo-Chul Lim, “Real-time Video Prediction Using GANs With Guidance Information for Time-delayed Robot Teleoperation”, International Journal of Control, Automation and Systems, 21, pp 2387–2397 2023, DOI : 10.1007/s12555-022-0358-3
Jung-Hwan Yang, Seong-Yong Kim, and Soo-Chul Lim, “Effects of sensing tactile arrays, shear force, and proprioception of robot on texture recognition”, Sensors 2023, 23(6) 2023, DOI : 10.3390/s23063201
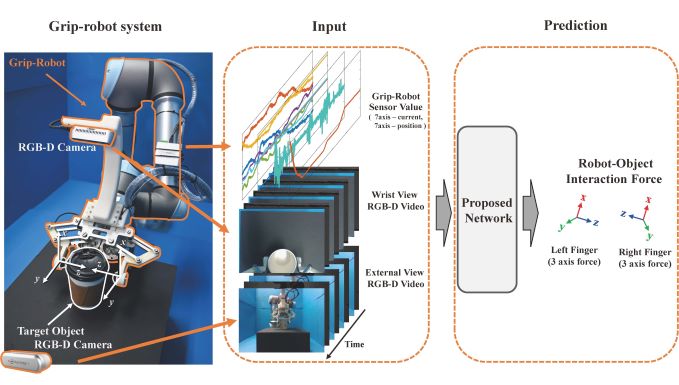
Dae-Kwan Ko, Kang-Won Lee, Dong Han Lee, and Soo-Chul Lim, “Vision-Based Interaction Force Estimation for Robot Grip Motion without Tactile/Force Sensor”, Expert Systems with Applications, Vol 211, 118441, 2023, DOI : 10.1016/j.eswa.2022.118441
2022
Kang-Won Lee, Seung-Chan Kim, and Soo-Chul Lim, “DeepTouch: Enabling Touch Interaction in Underwater Environments by Learning Touch-induced Inertial Motions”, IEEE Sensors Journal, Vol 22(9), 2022, DOI: 10.1109/JSEN.2022.3163664
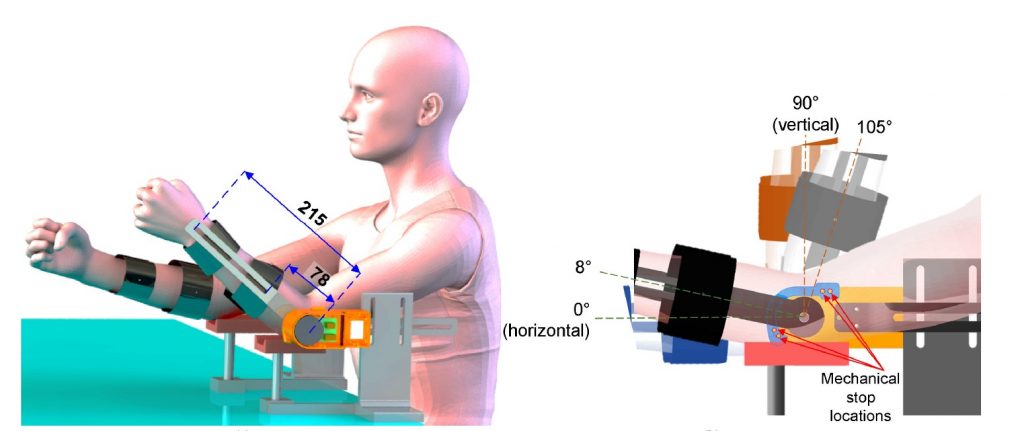
Kang-Won Lee, Sang-Hoon Kang, and Soo-Chul Lim, “Simple and Reliable Position Sense Assessment Under Different External Torques: Toward Developing a Post-Stroke Proprioception Evaluation Deviceo”, IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol 30, 2022, DOI: 10.1109/TNSRE.2022.3161948
2021
Kang-Won Lee, Dae-Kwan Ko, and Soo-Chul Lim, “Toward Vision-based High Sampling Interaction Force Estimation with Master Position and Orientation for Teleoperation”, IEEE Robotics and Automation Letters, Vol 6(4), pp6640-6646, DOI: 10.1109/LRA.2021.309484948
Won-Jo Jung, Kyung-Soo Kwak, and Soo-Chul Lim, “Vision-Based Suture Tensile Force Estimation in Robotic Surgery”, Sensors, 21(1), 110, 2021, DOI: 10.3390/s21010110
Before 2020
Semin Ryu, Dongbum Pyo, Soo-Chul Lim*, Dong-Soo Kwon*, Rendering Strategy to Counter Mutual Masking Effect in Multiple Tactile Feedback, Applied Sciences, 10 (14), 4990, 2020, DOI: 10.3390/app10144990
Dae-Kwan Ko, Dong-Han Lee, and Soo-Chul Lim, “Continuous Image Generation from Low-Update-Rate Images and Physical Sensors through a Conditional GAN for Robot Teleoperation”, IEEE Transactions on Industrial Informatics, Vol. 17(3), pp 1978-1986, 2020, DOI: 10.1109/TII.2020.2991764
Hochul Shin, Hyeon Cho, Dongyi Kim, Dae-kwan Ko, Soo-Chul Lim* and Wonjun Hwang*, “Sequential Image-based Attention Network for Inferring Force Estimation without Haptic Sensor”, IEEE Access, Vol 7, pp150237 – 150246, 2019, DOI: 10.1109/ACCESS.2019.2947090
Minhyun Jung, Sujaya Kumar Vishwanath, Jihoon Kim, Dae-Kwan Ko, Myung-Jin Park, Soo-Chul Lim* and Sanghun Jeon*, “Transparent and Flexible Mayan-Pyramid-based Pressure Sensor using Facile-Transferred Indium tin Oxide for Bimodal Sensor Applications”, Scientific Reports, Volume 9, Article number: 14040, 2019, DOI : 10.1038/s41598-019-50247-4
Sanghun Jeon, Soo-Chul Lim, Tran Quang Trung, Minhyun Jung, and Nae-Eung Lee, “Flexible Multimodal Sensors for Electronic Skin: Principle, Materials, Device, Array Architecture, and Data Acquisition Method”, Proceedings of the IEEE, 107(10), pp 2065 – 2083, 2019, DOI: 10.1109/JPROC.2019.2930808
Dongyi Kim, Hyeon Cho, Hochul Shin, Soo-Chul Lim and Wonjun Hwang, “An Efficient Three-Dimensional Convolutional Neural Network for Inferring Physical Interaction Force from Video”, Sensors, 19(16), 3579, 2019, doi : 10.3390/s19163579
Asif Khan, Dae-Kwan Ko, Soo Chul Lim*, Heung Soo Kim*, “Structural vibration-based classification and prediction of delamination in smart composite laminates using deep learning neural network”, Composites Part B: Engineering, Vol 161, 386-594, 2019, doi:10.1016/j.compositesb.2018.12.118
Dong-Han Lee, Wonjun Hwang, Soo-Chul Lim*, “Interaction Force Estimation using Camera and Electrical Current without Force/Torque Sensor”. IEEE Sensors Journal, Vol 18, No. 21, pp 8863-8872, 2018, doi: 10.1109/JSEN.2018.2868332
Semin Ryu, Dongbum Pyo, Soo-Chul Lim, Dong-Soo Kwon. “Mechanical Vibration Influences the Perception of Electrovibration”. Scientific Reports, 8(1), 4555, 2018. doi: 10.1038/s41598-018-22865-x.
Hyundo Choi, Keehong Seo, Seungyong Hyung, Youngbo Shim and Soo-Chul Lim* “Compact Hip-Force Sensor for a Gait-Assistance Exoskeleton System” , Sensors, 18(2), 566, 2018, doi: 10.3390/s18020566
Wonjun Hwang, Soo-Chul Lim*, “Inferring Interaction Force from Visual Information without Using Physical Force Sensors”, Sensors, 17(11), 2455, 2017, doi: 10.3390/s17112455
Hyun-Jun Hwang*, Soo-Chul Lim*, Kyung-Chul Ok, Jin-Seong Park and Hak-Sung Kim (* same contribution), “Photonic sintering via flash white light combined with deep UV and NIR for SrTiO3 thin film vibration touch panel applications”, Nanotechnology, Volume 27, Number 50, 505209, 2016 (SCI)
Seung-Chan Kim, Soo-Chul Lim, Jungsoon Shin, Jaehyuk Choi, “Biometrics for electronic eyes: system authentication with embedded CMOS image sensor”, IEEE Transactions on Consumer Electronics ,Volume 62, Issue 3, pp209-215, 2016 (SCI)
Seung-Chan Kim and Soo-Chul Lim*(corresponding author), “Transferring Data from Smartwatch to Smartphone through Mechanical Wave Propagation”, Sensors, 15(9), pp 21394-21406, 2015 (SCIE)
Soo-Chul Lim, Jungsoon Shin, Seung-Chan Kim and Joonah Park, “Expansion of Smartwatch Touch Interface from Touchscreen to Around Device Interface Using Infrared Line Image Sensors”, Sensors, 15(7), pp16642-16653, 2015 (SCIE)
Jihyung Yoo, Seokpyo Yun, Soo-Chul Lim, Joonah Park, Kwang-Seok Yun, Hyung-Kew Lee, “Position controlled pneumatic tactile display for tangential stimulation of a finger pad”, Sensors and Actuators A: Physical, Volume 229, pp 15–22, 2015 (SCI)
Seokpyo Yun, Jihyung Yoo, Soochul Lim, Joonah Park, Hyung-Kew Lee, Kwang-Seok Yun, “Three-axis pneumatic tactile display with integrated capacitive sensors for feedback control”, Microsystem Technologies, Volume 22, Issue 2, pp 275-282, 2016 (SCI)
Soo-Chul Lim, Hyung-Kew Lee, and Joonah Park, “Role of combined tactile and kinesthetic feedback in minimally invasive surgery”, International Journal of Medical Robotics and Computer Assisted Surgery, Vol 11, Issue 3, pp 360–374, 2015 (SCIE)
Soo-Chul Lim, Hyung-Kew Lee, and Joonah Park, “Grip force measurement of forceps with fiber Bragg grating sensors”, Electronics Letters, vol 50, no 10, pp.733-735, 2014 (SCI)
※ This paper was selected in the feature section in the front of Electronics Letters (vol 50, no 10) pp 719, 2014, DOI:10.1049/el.2014.1488
Soo-Chul Lim, Hyung-Kew Lee, EunHyup Doh, Kwang-Seok Yun and Joonah Park, “Tactile Display with Tangential and Normal Skin Displacement for Robot-Assisted Surgery,” Advanced Robotics, vol 28, Issue 13, pp 859-868, 2014 (SCIE)
S Pyo, J-I Lee, M-O Kim, T Chung, Y Oh, S-C Lim, J Park and J Kim, “Development of Flexible Three-Axis Tactile Sensor Based on Screen-Printed Carbon Nanotube-Polymer Composite”, Journal of Micromechanics and Microengineering, vol 24, no 7, doi:10.1088/0960-1317/24/7/075012, 2014 (SCI)
Soo-Chul Lim, Ki-Uk Kyung, Dong-Soo Kwon, “Presentation of Surface Height Profiles Based on Frequency Modulation at Constant Amplitude Using Vibrotactile Elements.” Advanced Robotics, vol 25, Issue 16, pp. 2065-2081, 2011 (SCIE)
Soo-Chul Lim, Ki-Uk Kyung, Dong-Soo Kwon, “Effect of Frequency Difference on Sensitivity of Beat Perception.” Experimental Brain Research, vol 216, pp. 11-19, 2011 (SCI)
Zeungnam Bien, Myung-Jin Chung, Pyung-Hun Chang, Dong-Soo Kwon, Dae-Jin Kim, Jeong-Su Han, Jae-Hean Kim, Do-Hyung Kim, Hyung-Soon Park, Sang-Hoon Kang, Kyoobin Lee, Soo-Chul Lim “Integration of a Rehabilitation Robotic System (KARES II) with Human-Friendly Man-Machine Interaction Units.” Auton. Robots 16(2): 165-191, 2004 (SCI)